
多旋翼无人机飞控系统设计之详细设计方案
在进行多旋翼无人机飞控系统设计之前,有必要列写一份详细的设计方案书;这是飞控系统设计的基石,并且在一定程度上指导了后续的研发工作。本篇博文列写了之前笔者在进行无人机飞控开发过程中所撰写的精简版本的设计方案书,虽有不完善之处,但也在一定程度上对飞控系统的整个硬件和软件逻辑进行了梳理,有一定的参考价值。
系统功能
1.1实时姿态解算
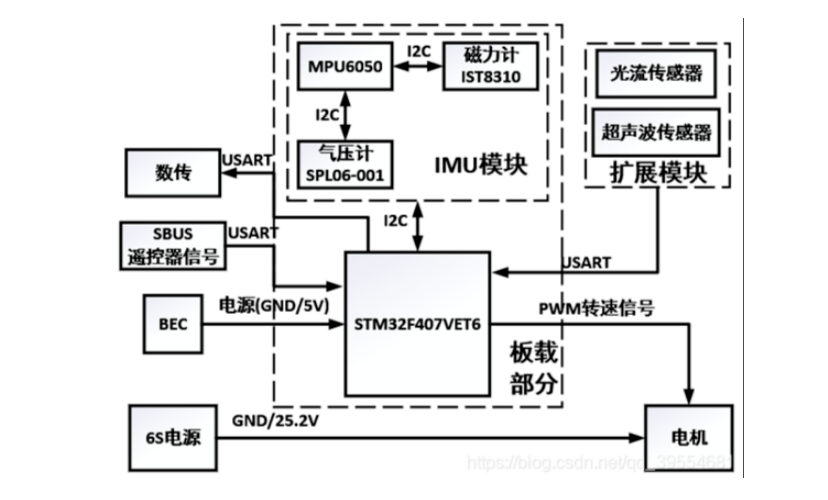
拟采用MPU6050+IST8310(磁力计)+SPL06-001/MS5611(气压计)的IMU配置,采用I2C/SPI总线进行实时的传感器数据获取,并进行数据融合(互补滤波/Kalman滤波)得到实时的姿态角和姿态角速度数据。
1.2姿态控制
使用PID控制器,根据姿态角误差产生期望的控制量。
1.3位置估计
使用超声波和气压计融合的方式获取无人机当前高度,使用光流传感器来得到无人机的平动速度。
1.4位置控制
通过位置误差产生期望的姿态角,无人机跟踪期望姿态角,从而消除位置误差。
1.5电机控制
根据姿态信息,通过PID控制器产生实时的控制量,使用定时器产生不同占空比的PWM波来控制四个旋翼电机转速。
1.6实时通信
使用数传将无人机的飞行数据实时回传到地面站。
1.7姿态模式
只开启姿态自稳功能。
1.8定高模式
使用姿态自稳+定高控制,在保持姿态稳定的基础上加入高度闭环控制,使无人机达到高度稳定的效果。
1.9定点模式
使用姿态自稳+定高控制+位置控制,无人机三个通道的位置均闭环控制,达到定点的效果。
1.10飞行状态实时显示
通过LED模块显示无人机实时飞行状态。
2.硬件方案
2.1硬件原理图
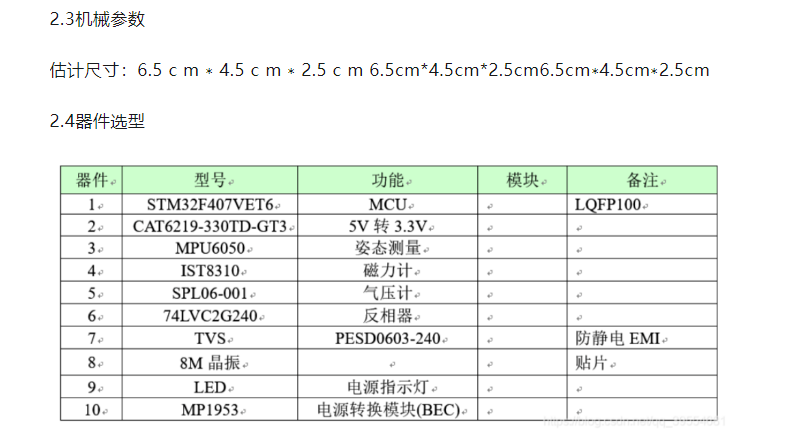
2.5硬件设计要点
a.电机转动带来的震动会对姿态解算精度造成很大影响,所以设计要考虑减震措施。
b.设计要充分考虑密封防护措施,以提高防尘防水性能。
c.PCB板上加入测试点,方便检测与调试。
2.6硬件测试方法
1)电源线路部分的测试,板子上电后检查各个节点电压是否正常,是否有短路和断路的情况存在。
2)进行MCU的焊接,随后使用简单的例程来测试MCU功能是否正常,焊接是否正常。
3)使用示波器检测PWM端口输出是否正常。
4)使用串口输出姿态数据来检测IMU模块是否正常。
3.软件方案
3.1软件功能
1)通过姿态解算,得到实时的无人机姿态角和姿态角速度信息。
2)通过扩展传感器模块,得到实时的无人机的位置信息。
3)通过SBUS通信模块,获得遥控器的各个通道值。
4)通过PID控制器进行无人机的姿态和位置的控制。
5)通过LED模块实时显示无人机所处的状态,操控者能在较远视距飞行时得到实时反馈。
3.2模块功能划分
1)IMU模块
2)扩展传感器模块
3)BEC模块
4)电机控制模块
5)SBUS通信模块
6)数传通信模块
7)LED模块
3.3流程调度
1)进行LED、IMU、USART、PWM、ADC、TIMER和PID参数的初始化。
2)IMU传感器测量值通过I2C接口输入MCU,进行姿态解算,更新姿态信息。
分享到:






评论 (0人参与)
最新评论