
国外超大型无人潜航器发展与运用研究

无人潜航器(UUV)作为一种水下无人平台,可搭载多种设备或武器执行特定任务,在极端或危险环境中替代人类作业,具有很高的灵活性、生存力和效费比,被美国等海军强国视为现代海军“力量倍增器”[1],已成为海军热点装备。按尺寸大小,UUV分为小型无人潜航器(SUUV)、中型无人潜航器(MUUV)、大型无人潜航器(LDUUV)、超大型无人潜航器(XLUUV)等类型。在各类UUV中,XLUUV承载力和自持力强,可执行多种作战任务,在作战使用上更接近有人驾驶潜艇[2]。
早在20世纪80年代,美国就开始发展XLUUV,2010年,形成了LSV-1,LSV-2,“曼塔”(Manta),MASTT等型号,主要用于装备研发、实验验证、演习训练和配合潜艇作战。此后,美国海军不断对XLUUV提出新要求:2011年发布《水下作战纲要》强调用无人装备部分替代核潜艇执行水下作战任务[3];2017年发布《恢复美国制海权》进一步建议美国海军装备超大型和智能型UUV[4],据此,美国开发了“回声旅行者”(Echo Voyager)和“虎鲸”(Orca)XLUUV,不但可与核潜艇协同编组,在某些场景下还可替代核潜艇独立执行多种作战任务;2022年5月,美国国会报告《海军大型无人水面与水下航行器:背景和国会议题》指出,美国海军希望开发和采购大型无人水面舰艇(LUSV)、中型无人水面舰艇(MUSV)和XLUUV[5]。根据有关规划,到2045年,美国海军将拥有由373艘有人舰艇和150艘大型无人舰艇组成的超级舰队,其中XLUUV将达到或超过60艘。
2018年,在美国主导下,英国、法国、德国等签署《海上无人系统倡议》,旨在通过联合使用海上武器和无人系统,提升北约成员国海上作战能力,应对不断增长的潜艇威胁[6]。除美国外,正在发展XLUUV的国家还包括德国、英国、澳大利亚、法国等,其中:德国XLUUV代号为“MUM”,主要用于水下运输、深海勘察、科学研究和海洋安全[7-8];英国XLUUV代号为“塞特斯”(Cetus),旨在配合北约构建海上无人作战体系,应对水下安全新威胁[9];澳大利亚的代号为“幽灵鲨”(Ghost Shark),用于情报监视侦察、基础设施检查等,以增强潜艇和海面作战部队在印太地区的敏捷性,提升作战效能[10];法国XLUUV则主要用于水雷战和反潜战[11]。
随着XLUUV的不断发展,其在作战领域的运用也将日益广泛,势必给未来海战带来颠覆性影响。本文将在梳理国外XLUUV发展现状及未来趋势的基础上,剖析其关键技术,探析在侦察监视、水下布雷、水下攻防及投送等方面的典型运用,以期为国内XLUUV发展与运用提供借鉴。

XLUUV作为一种装备概念,由美国海军部提出,指直径大于7 ft(即2.133 m)的UUV。根据这一标准,目前世界上发展XLUUV的国家主要包括美国、英国、法国、德国、澳大利亚等。俄罗斯等国家也在发展尺寸较大的UUV,但径向尺寸明显小于7 ft,可归到LDUUV的范畴。美国在XLUUV开发方面积累了大量经验,在全球处于领先地位。与美国相比,部分国家发展的XLUUV在技术特征和关键性能上做了较大创新。XLUUV呈现出族群化、远程化、全深化、智能化发展趋势,以满足未来海战对水下无人力量的协同性、广域性、隐身性、自主性要求。
1.1 国外XLUUV发展现状
XLUUV大致分为五类,分别是普通型、潜载型、类潜艇型、可装箱型和集装箱型,如表1所示。不同类型的XLUUV在功能上互补,有利于提高水下无人作战的整体效能。
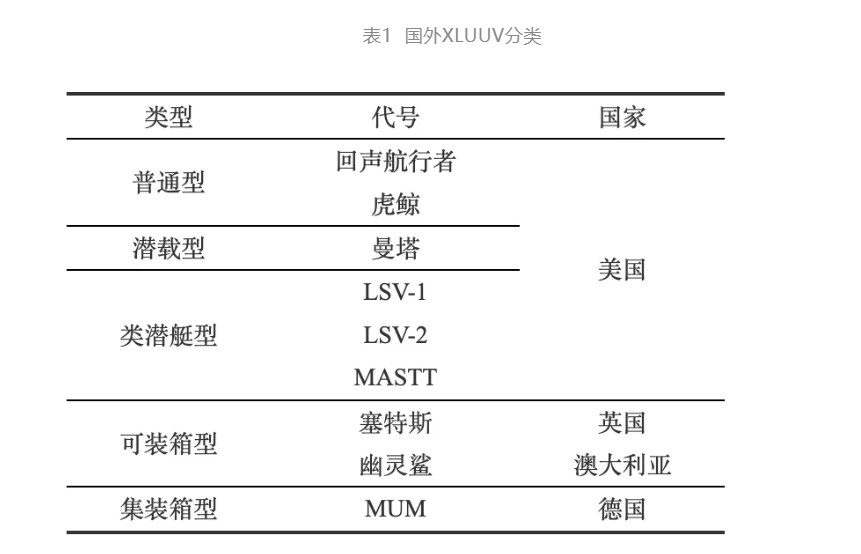
普通型XLUUV,指符合美国海军对XLUUV的基本定义和功能要求,采用常规几何外形和通用技术手段,且无需借助舰艇、集装箱或其他装备实施输送的XLUUV,主要包括“回声航行者”和“虎鲸”。
2016年,波音公司开发了“回声航行者”。该XLUUV宽2.6 m,长15.5 m,加装模块化载荷舱后长度可拓展至25.9 m;净重50 t,载重8 t,最大潜深3 000 m;最大航速8 kn,最小航速2.5 kn,最佳航速2.5~3.0 kn;采用柴电混合能源动力系统,单次充满电后可续航278 km,所携带的柴油燃料可满足12 000 km最大航程需求;可由港口自航至任务海域,连续作业数月。2017年,“回声航行者”进入测试阶段,对其平台进行了改进,并在此基础上开发“虎鲸”(图1)。“虎鲸”主要参数与“回声航行者”基本相同,主要执行布雷、反潜、反舰、对陆打击等任务[12]。
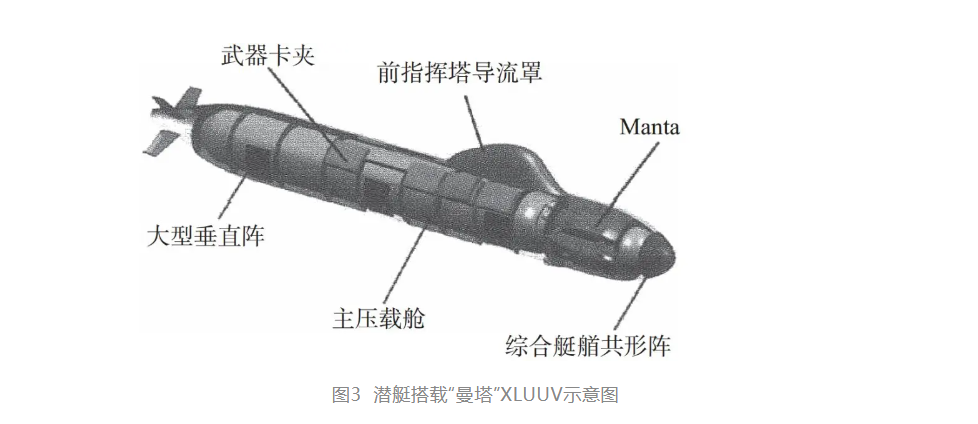
 潜载型XLUUV,是指可搭载于潜艇的XLUUV,目前主要指“曼塔”。该XLUUV可搭载于弗吉尼亚级攻击型核潜艇艇艏,与母艇共形,配备的传感器和水下武器可与母艇共享。当需要前出执行任务时,“曼塔”可脱离母艇,以4.5~10.0 kn速度潜航,抵达目标海域。“曼塔”试验样机(图2)重7.5 t,最大航速10 kn[13]。“曼塔”原型机尺寸较大,重约50 t,与“虎鲸”“回声航行者”相当,可搭载4枚重型鱼雷[14];潜深244 m,与弗吉尼亚级攻击型核潜艇相当。美国海军计划采购30艘“曼塔”,每4艘“曼塔”与1艘潜艇协同(图3),主要执行近海水下反潜反舰作战任务。
潜载型XLUUV,是指可搭载于潜艇的XLUUV,目前主要指“曼塔”。该XLUUV可搭载于弗吉尼亚级攻击型核潜艇艇艏,与母艇共形,配备的传感器和水下武器可与母艇共享。当需要前出执行任务时,“曼塔”可脱离母艇,以4.5~10.0 kn速度潜航,抵达目标海域。“曼塔”试验样机(图2)重7.5 t,最大航速10 kn[13]。“曼塔”原型机尺寸较大,重约50 t,与“虎鲸”“回声航行者”相当,可搭载4枚重型鱼雷[14];潜深244 m,与弗吉尼亚级攻击型核潜艇相当。美国海军计划采购30艘“曼塔”,每4艘“曼塔”与1艘潜艇协同(图3),主要执行近海水下反潜反舰作战任务。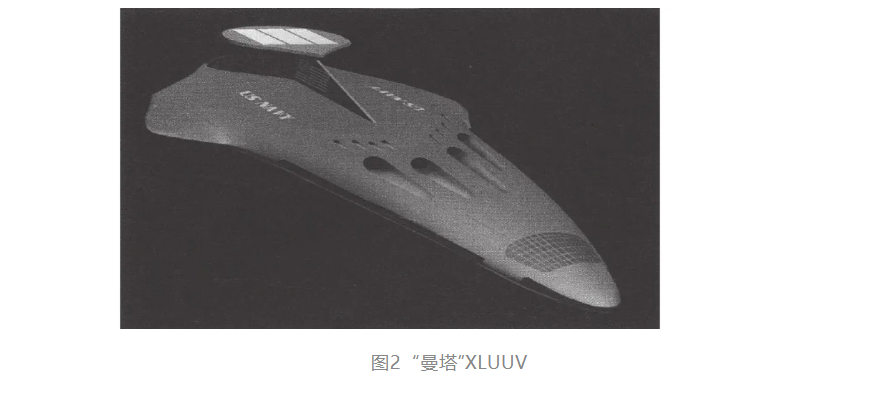
 类潜艇型XLUUV,是指几何及物理特征与潜艇类似的XLUUV,主要包括LSV-1,LSV-2,MASTT。LSV-1又名“红鲑鱼”(Kokanee),由海狼级攻击型核潜艇按1/4缩比而成,宽3.05 m,长27.43 m,重150 t,采用高功率电动机推进。LSV-2又名“割喉鳟”(Cutthroat)(图4),由“弗吉尼亚”级攻击型核潜艇按1/4缩比而成,宽3.05 m,长33.83 m,重205 t,能源动力模式与LSV-1相同[15]。MASTT全称“可移动反潜训练靶标”(Mobile Anti-Submarine Training Target)(图5),宽2.2 m,长23 m,重70 t,作业深度100 m;采用铅酸电池供电,巡航速度3 kn,最大航速8.5 kn,可在最大航速条件下持续航行107 km;在水下采用超声波调制解调器通信,浮出水面后采用射频和无线网通信;可搭载长度为40 ft(约12m)标准集装箱[16]。LVS-1和LVS-2分别为“海狼”级和“弗吉尼亚”级攻击型核潜艇的试验艇,用于隐身、水声、流体、动力等方面的研究及试验;MASTT主要用于反潜训练,代替潜艇充当反潜靶标。但考虑到类潜艇型XLUUV强大的搭载能力,完全有可能配置情报/监视/侦察(ISR)传感器、水雷、鱼雷、导弹等任务载荷,有望在未来海战中发挥重要的作用。
类潜艇型XLUUV,是指几何及物理特征与潜艇类似的XLUUV,主要包括LSV-1,LSV-2,MASTT。LSV-1又名“红鲑鱼”(Kokanee),由海狼级攻击型核潜艇按1/4缩比而成,宽3.05 m,长27.43 m,重150 t,采用高功率电动机推进。LSV-2又名“割喉鳟”(Cutthroat)(图4),由“弗吉尼亚”级攻击型核潜艇按1/4缩比而成,宽3.05 m,长33.83 m,重205 t,能源动力模式与LSV-1相同[15]。MASTT全称“可移动反潜训练靶标”(Mobile Anti-Submarine Training Target)(图5),宽2.2 m,长23 m,重70 t,作业深度100 m;采用铅酸电池供电,巡航速度3 kn,最大航速8.5 kn,可在最大航速条件下持续航行107 km;在水下采用超声波调制解调器通信,浮出水面后采用射频和无线网通信;可搭载长度为40 ft(约12m)标准集装箱[16]。LVS-1和LVS-2分别为“海狼”级和“弗吉尼亚”级攻击型核潜艇的试验艇,用于隐身、水声、流体、动力等方面的研究及试验;MASTT主要用于反潜训练,代替潜艇充当反潜靶标。但考虑到类潜艇型XLUUV强大的搭载能力,完全有可能配置情报/监视/侦察(ISR)传感器、水雷、鱼雷、导弹等任务载荷,有望在未来海战中发挥重要的作用。
 可装箱型XLUUV,是指可内置于标准集装箱的XLUUV,包括“塞特斯”和“幽灵鲨”。“塞特斯”直径2.2 m,长12 m,重17 t,可置于40 ft标准集装箱内(图6);最大潜深大于400 m,航程1 850 km,独立行动,或与机敏级攻击型核潜艇协同行动[17],用于保护水下重要基础设施,监视海底活动。据悉,“幽灵鲨”的尺寸与校车相当,由此可判断,其几何参数与“塞特斯”接近,但是其设计尺寸与重量等具体参数尚未见诸公开文献。“幽灵鲨”的试验样机尺寸较小,被命名为“Dive”,属于LDUUV,可在 6000 m深海底连续执行任务10 d,用于执行监视、瞄准、攻击等作战任务。
可装箱型XLUUV,是指可内置于标准集装箱的XLUUV,包括“塞特斯”和“幽灵鲨”。“塞特斯”直径2.2 m,长12 m,重17 t,可置于40 ft标准集装箱内(图6);最大潜深大于400 m,航程1 850 km,独立行动,或与机敏级攻击型核潜艇协同行动[17],用于保护水下重要基础设施,监视海底活动。据悉,“幽灵鲨”的尺寸与校车相当,由此可判断,其几何参数与“塞特斯”接近,但是其设计尺寸与重量等具体参数尚未见诸公开文献。“幽灵鲨”的试验样机尺寸较小,被命名为“Dive”,属于LDUUV,可在 6000 m深海底连续执行任务10 d,用于执行监视、瞄准、攻击等作战任务。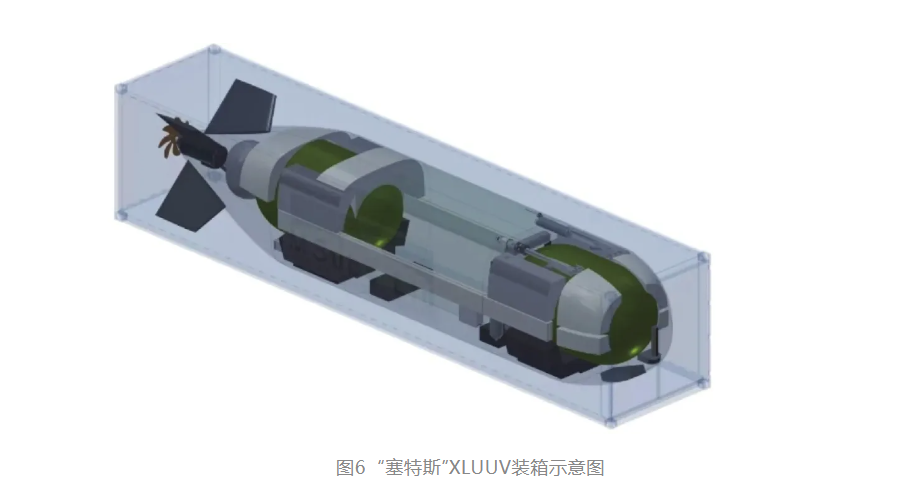 集装箱型XLUUV,是指载荷舱采用标准集装箱配置的XLUUV,目前主要指MUM(图7)。MUM采用扁平的比目鱼结构,长度25 m,宽度是“回声航行者”和“虎鲸”的2倍,具有较好的航行稳定性和强大的搭载能力;采用不依赖空气推进(AIP)的氢燃料电池动力系统,可在5000 m深远海执行任务[18]。按照有关设计,母艇可发挥集装箱的作用,在码头进行模块化卸载及装载。此外,MUM还可将设备投送至海底,执行检测、维护、维修、勘探等任务。尽管MUM目前主要用于民用领域,但德国海军对其保持密切关注,未来有望向军事领域拓展。
集装箱型XLUUV,是指载荷舱采用标准集装箱配置的XLUUV,目前主要指MUM(图7)。MUM采用扁平的比目鱼结构,长度25 m,宽度是“回声航行者”和“虎鲸”的2倍,具有较好的航行稳定性和强大的搭载能力;采用不依赖空气推进(AIP)的氢燃料电池动力系统,可在5000 m深远海执行任务[18]。按照有关设计,母艇可发挥集装箱的作用,在码头进行模块化卸载及装载。此外,MUM还可将设备投送至海底,执行检测、维护、维修、勘探等任务。尽管MUM目前主要用于民用领域,但德国海军对其保持密切关注,未来有望向军事领域拓展。
1.2 国外XLUUV未来发展趋势
根据美军构想,未来海战,有生兵力和大型平台后移至对手远程精确打击范围以外,最大限度降低人员伤亡率和高价值装备战损率;无人力量前出至对手近海乃至纵深区域,形成侦察和进攻前沿力量。与上述构想相适应,未来,国外XLUUV将进一步向族群化、远程化、全深化、智能化发展:族群化有利于丰富水下无人作战的可用手段;远程化和全深化有利于拓展水下战场空间、提高水下环境利用率;智能化有利于提高水下无人作战的敏捷性、灵巧性和时效性。
1.2.1 族群化
国外XLUUV的族群化,可从美国与欧澳两个方面进行分析。
1) 美国发展多种类型的XLUUV,广度上覆盖近海和远海,深度上覆盖浅海和深海,运用方式上区分为独狼行动、集群行动和有人/无人协同行动,功能上包括情报监视侦察、布雷、反潜、反舰、水声对抗等,形成功能完备的XLUUV族群。 2) 欧洲国家和澳大利亚开发的XLUUV具备一些新特点,与美国XLUUV形成优势互补,在《海上无人系统倡议》[6]框架下进一步丰富了XLUUV族群,拓展了水下战场的广度和深度,增强了其水下行动的灵活性和高效性。 1.2.2 远程化国外XLUUV的远程化,包括续航里程的远程化和隐蔽潜航的远程化。 1) 续航里程的远程化。通过合理选择能源动力模式和航速,“回声航行者”和“虎鲸”最大航程均达上万千米,可从其基地港口出发横渡大洋;“塞特斯”续航1 850 km,虽不及“回声航行者”和“虎鲸”,但与航程大多只有几十千米的中小型UUV相比,依然具有显著的远程化优势;MUM虽未公布其续航里程,但强调可在深远海海域执行任务。由于普遍采用柴电混合动力模式,国外XLUUV需周期性上浮发电,续航里程虽远,但单次隐蔽潜航的距离较近,以航程达上万千米的“虎鲸”为例,在2.5 kn航速下仅能潜航50 h。 2) 隐蔽潜航的远程化。未来,国外XLUUV可能采用非核AIP系统、小型核动力系统等新型能源动力模式,将极大提高其隐蔽潜航的里程。尤其采用小型核动力系统以后,XLUUV无须定期上浮充电,有望在水下连续潜航数万千米。 1.2.3 全深化国外XLUUV的全深化,是指其极限潜深覆盖海洋中层带、深层带、深渊带,呈现出全深化趋势。 1) 中层带XLUUV,主要包括“曼塔” “塞特斯”、LSV-1和LSV-2等,极限潜深被包含于中层带深度区间(200~1 000 m)。 2) 深层带XLUUV,主要包括“回声航行者”和“虎鲸”,极限潜深均为3 000 m左右,包含于深层带深度区间(1 000~4 000 m)。 3) 深渊带XLUUV,主要包括MUM和“幽灵鲨”,极限潜深分别为5 000和6 000 m,包含于深渊带深度区间(4 000~6 000 m)。 中层带XLUUV适合近海作战,或作为潜艇的忠诚僚艇遂行作战任务。深层带和深渊带XLUUV超出现有鱼雷、水雷、深弹等水下武器的极限潜深,可有效规避敌水下武器的打击,极大增强自身生存能力,具有显著的非对称优势。 1.2.4 智能化国外XLUUV的智能化,是指其具备智能感知、自主决策等功能,在无人干预的情况下执行多种作战任务。 1) 智能感知。XLUUV运用艇艏艇壳声呐、潜标声呐、浮标声呐及光电传感器、小型侦察UUV、小型侦察无人机等,构成分布式侦察体系,在多源异构数据处理算法支持下,可智能感知水下、海面、空中、岸上环境。 2) 自主决策。XLUUV在智能控制技术支持下,可敏捷切换作战功能,发现敌目标前采用安静或低速巡航模式,发现敌目标后机动至最佳战位,视情选择对抗策略;在智能编组技术支持下,可与其他有人及无人力量协同,以增强整体对抗优势;在动态效能评估与智能反馈技术支持下,及时评估对抗效果,敏捷调整对抗策略,直至达成预期作战目的。
2.1 模块化技术
2.1.1 模块化技术现状国外XLUUV模块化技术包括两个方面,分别是总体结构的模块化和任务载荷的模块化。1) 总体结构的模块化。以“虎鲸”为例,总体结构由控制舱、载荷舱、动力舱等不同功能的模块化舱段组成,控制舱搭载声呐、换能器、测深仪以及控制单元,载荷舱携带多种任务载荷,动力舱装有柴油发电机、蓄电池、通气管、泵喷推进器、方向舵等。除了“虎鲸”,国外其他XLUUV的总体结构也普遍采用了模块化设计思路,通过总体结构的模块化设计,可满足复杂性可控、并行工作、多样性升级需求[19]。 2) 任务载荷的模块化。XLUUV任务载荷具有模块化可重构优点,可根据任务需求灵活配置[20]例如:水下布雷时可搭载水雷;水下袭击时可搭载鱼雷、导弹;侦察监视时可搭载ISR设备;水声对抗时可搭载水声诱饵、水声干扰器等水声对抗装备。这种模块化的设计显著增强了XLUUV的功能多样性和应用的广泛性,使其能够适应多变的战场环境和任务需求。 2.1.2 模块化技术趋势未来,国外XLUUV将进一步借鉴船舶工程及其他技术领域的模块化设计理念,开发多种类型的标准化平台模块、功能模块和任务模块。各类标准化模块可像搭积木一样灵活对接,组成不同大小、不同形状、不同功能的XLUUV,以满足多种任务需求。 随着人工智能的发展,智能化赋能将成为模块化技术的重要趋势。通过智能化赋能,各标准化模块将具备自主性,模块化集群将获得群体智能。各标准化模块在无人干预条件下,自主构建满足任务需求的XLUUV。任务完成后,XLUUV自主分解为多个标准化模块,以便根据任务变化重构新的XLUUV。在人工智能支持下,模块化技术将显著提高XLUUV对任务的自适应能力。
2.2 多域通信技术
2.2.1 多域通信技术现状目前,国外XLUUV的通信手段主要包括水声通信和无线电通信。 1) 水声通信。XLUUV水声通信由通信声呐实现,利用声波在水中传播达成通信目的,主要用于与其他水下装备、水面舰艇、海岸声呐站之间的信息传递。水声通信的优点是可实现信息在水下远程传播;缺点是水声信道存在通频带有限、时延拓展较大、频率选择性衰落、易受多普勒效应影响等问题,导致水声通信效率低下[21-22]。 2) 无线电通信。XLUUV无线电通信由通信桅杆实现,通信时,通信桅杆露出水面,利用通信卫星、短波、超短波等与指挥所及其他平台实现通联[23-24]。无线电通信在一定程度上弥补了水声通信效率低下的缺陷,但上浮通信容易暴露目标,使XLUUV容易遭遇反辐射侦察和攻击。 2.2.2 多域通信技术趋势随着蓝绿激光通信、低频/甚低频/极低频通信等跨介质通信技术不断成熟,XLUUV的通信手段将进一步丰富。 1) 蓝绿激光通信。蓝绿激光穿透性强、传输速率高、保密性好,可穿透海面实现对潜通信[25-26] 。在实验环境中,美国蓝绿激光对海水的穿透距离达3 00 m[27]。另有研究指出,蓝绿激光穿透距离受水质条件影响较大,在纯净海水、远海、沿岸和港口海水中穿透距离分别为240,80,50和15 m[28]。 2) 低频/甚低频/极低频通信。低频无线电波频率30~300 kHz,可穿透海水数米;甚低频无线电波频率3~30 kHz,可穿透海水10~20 m;极低频无线电波频率0.003~3.000 kHz,可穿透海水100~200 m。一些团队提出低频/甚低频磁性天线小型化设计理念,为XLUUV跨介质通信提供了重要思路[29]。 新型跨介质通信与传统水声通信、无线电通信协同,可使XLUUV与岸海空天作战力量联通,深度融入全域联合作战体系。2.3 水下探测技术
2.3.1 水下探测技术现状目前,国外XLUUV的水下探测手段主要包括水声探测和多平台协同探测。 1) 水声探测。水声探测是水下探测主流方法,主要用于观测海洋环境和探测水下及海面目标[30-31]。XLUUV水声探测主要由声呐探测仪实现,探测距离较远,但受水文气象影响较大,探测精度、效率和稳定性有待提高。 2) 多平台协同探测。多艘XLUUV协同探测,或XLUUV与其他UUV协同探测,可克服单艇探测冗余性差、工作范围小、效率低下等问题[32],但多UUV协同编组存在一定的技术难度。XLUUV还可发射浮标传感器、小型无人机等侦察装备,浮标传感器可对海面及空中目标进行静态凝视和持久监视,小型无人机可对海面及岸上目标进行机动搜索和抵近侦察,有效拓展了水下探测的空间范围,但增加了被敌侦察和打击的风险。 2.3.2 水下探测技术趋势随着水下激光探测、电磁探测等水下非声探测技术的不断发展,XLUUV水下探测手段将进一步完善。 1) 水下激光探测。水下激光探测由激光雷达实现,通过发射蓝绿激光探测水下近程目标,具有定位准确、识别率高等优点[33-34]。 2) 水下电磁探测。水下电磁探测由电磁探测仪实现,通过识别舰艇水下电磁场实现探测目的,具有较高的稳定性、隐蔽性、精准度,探测距离达数千米[35-36]。 水下非声探测技术虽然优点明显,但与水声探测技术相比,探测距离较近,难以满足远距离水下警戒需求。水下非声探测技术和水声探测技术相辅相成,扬长避短,将极大提高对水下目标的识别效率。2.4 定位导航技术
2.4.1 定位导航技术现状目前,国外XLUUV的水下定位导航技术主要包括惯性导航、水声导航、组合导航。 1) 惯性导航。运用陀螺仪和加速度计,获取加速度、速度、位置等航行信息,实现导航和定位[37-39]。XLUUV采用惯性导航,抗干扰能力强,便于实现自主导航,但误差会随时间累积变大。 2) 水声导航。运用导航声呐等测算艇位,实施近距离定位导航,主要用于离靠码头、进出船坞和通过狭窄水道等情形,但难以在开阔海域实现远距离导航。 3) 组合导航。惯性导航、多普勒导航、水声导航相互组合,已成为水下导航的主流模式[40]。在水声导航覆盖范围以外,采用惯性导航和多普勒导航组合模式;进入水声导航覆盖范围以后,通过水声定位导航系统消除惯性导航和多普勒导航组合模式的精度漂移。 2.4.2 定位导航技术趋势随着地形导航、物理场导航、GPS导航在水下运用的成熟,XLUUV的导航模式将得到进一步拓展。 1) 地形及物理场导航。运用海底地形、地磁、重力等探测仪器,获取海底地形数据以及地磁、重力等物理场数据,与海底地形及物理场数据库进行匹配,通过数据处理得出所在位置[41-45]。地形及物理场导航具有较高精度,但对水下地形及物理场数据库的完备性和准确性提出较高要求。 2) GPS导航。XLUUV通过通信桅杆,与GPS系统建立通联,利用卫星信号确定艇位,可在全球范围或局部区域实现全天候、高精度三维定位和导航,但如果进入敌防区范围,容易遭遇敌电子侦察和反辐射打击。 XLUUV需根据具体场景因地制宜,综合运用多种定位导航方式,以提高定位导航的精准度和可靠性。2.5 自主控制技术
2.5.1 自主控制技术现状国外XLUUV的自主控制技术,主要包括运动自主控制、任务自主规划等内容。 1) 运动自主控制。运用PID控制、鲁棒控制、自适应控制、模糊控制等方法,对XLUUV航向、浮潜、回转、俯仰等运动状态进行控制。XLUUV一般采用两种以上的控制方法调节其运动,以克服单一运动控制方法在精度等方面的不足[46-47]。 2) 任务自主规划。运用智能控制技术,实现任务自主规划和功能敏
评论 (0人参与)
最新评论